Pilots Educated
Top-Rated Resource in 2025
In-Depth Articles
Cutting-Edge Imaging Technology
FPV
Speed

Beginner Guides & Best Budget Drones

Guide
Best Drones for Beginners: Top Picks for Learning to Fly with Confidence
Essential tips and reliable models to start your journey in aerial flight.
Learning
Drone Learning: The Complete Guide for Beginners Ready to Take Flight
A structured approach to mastering controls, safety, and basic maneuvers.
FPV
Beginners Racing Drone: The Complete Guide to Your First FPV Experience
Everything you need to know to choose your first racing quad and gear up.

1080p
Drone 1080p Camera: The Complete Guide to Full HD Drones for Beginners and Professionals
Finding the sweet spot between resolution, quality, and price for HD footage.

Budget
Best Drone Under $50: Top Budget Picks That Actually Perform
Don’t break the bank! Affordable drones that are perfect for practice.

Budget
Best Drone Under $300: Top Affordable Drones You Can Buy Today
A step up in quality without stepping into professional price ranges.

UAV
Cheap UAV for Sale: Finding Big Drones for Sale Cheap Without Breaking the Bank
Strategies for finding reliable used or entry-level professional UAVs.
Mobile
Camera Drone Phone: The Future of Mobile Photography
Leveraging your mobile device to control and capture aerial shots.
What Our Pilots Say
“The FMA guides on FPV racing were a game-changer. Went from beginner crashes to confidently flying gates in two weeks. Absolutely the best resource online!”
— Alex R., Pro Racer
“I used their thermal drone guide for my inspection business. The detail on sensor types and operational tips instantly paid for itself. Highly professional content.”
— Maya P., Inspection Pilot
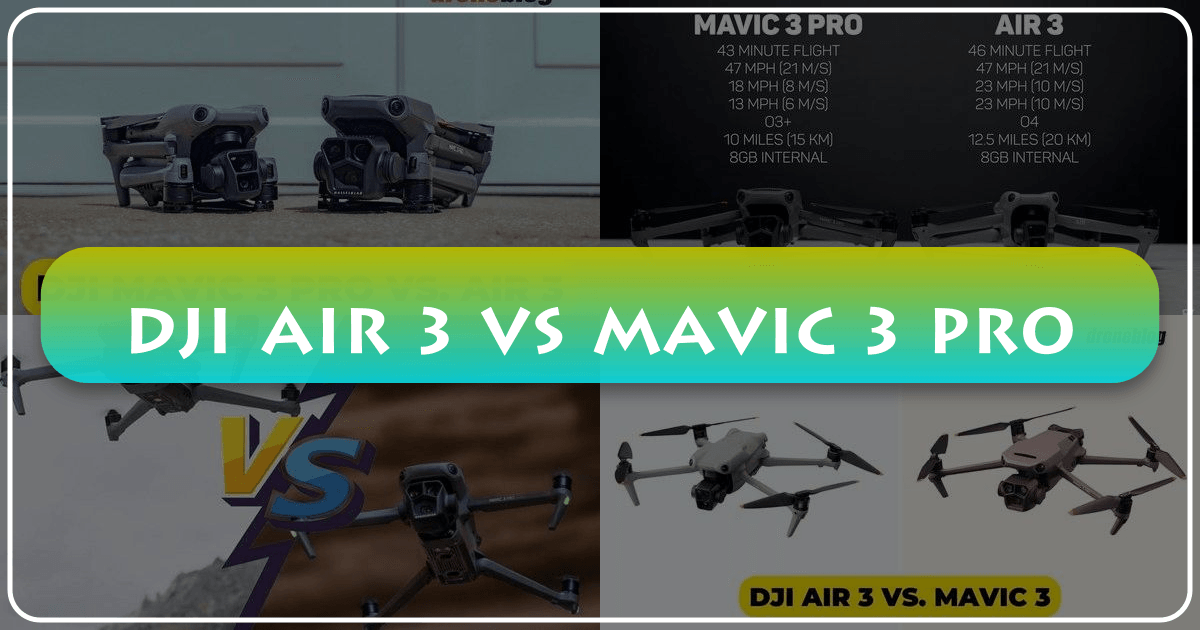
“The comparison between DJI models was spot-on. Helped me choose the Mavic 3 Pro over the Air 3 without any second guessing. Great depth of analysis.”
— Ben K., Hobby Photographer
“Their suggestions for drones under $300 gave me a fantastic practice quad. Learned to fly without the fear of destroying an expensive machine. Thank you, FMA!”
— Chloe D., Student Pilot
“The Aerial Photography guide is a must-read. It covers everything from composition to post-processing specific to drone shots. My portfolio instantly improved.”
— Sam L., Landscape Artist
“Detailed reviews on the newest gimbals and 4K cameras. It’s clear the team stays ahead of the curve. The only drone site I trust for technical advice.”
— Jason B., Filmmaker
DJI & Professional Drone Technology

DJI Guide
DJI for Sale Near Me: A Complete 2100‑Word Guide to Choosing the Best DJI Combo Drone

Comparison
DJI Drone Competitor: The Best American & Non-Chinese Alternatives in 2025
Frequently Asked Questions